







保持焊槍位置和姿勢不變的情況下,可以改變機器人的姿勢;7軸機器人的復雜示教,通過運用協調技術,實現簡單的手動操作;將焊接電纜內藏于第7軸機構中,示教作業時不需要擔心電纜與夾具及工件的干涉。
產品樣本下載使用說明書下載
| 構造 | 垂直多關節型 | ||
| 軸數 | 7 | ||
| 手臂*大可搬重量 | 6kg | ||
| 位置重復精度 | ±0.08mm(注1) | ||
| 驅動方法 | AC伺服馬達 | ||
| 驅動容量 | 3600W | ||
| 位置反饋 | 絕對值編碼器 | ||
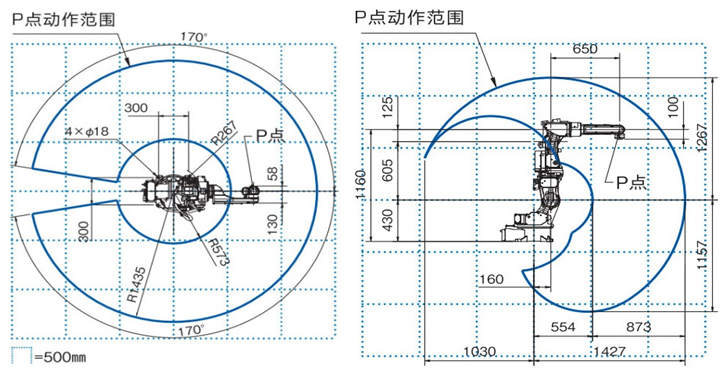
| 動作范圍 | 基本軸 | J1(旋轉1) | ±170° |
| J2(前后) | -145°~+70° | ||
| J7(旋轉2) | ±90° | ||
| J3(上下) | -170°~+149° | ||
| 手臂軸 | J4(回轉) | ±180° | |
| J5(擺動) | -50°~+230° | ||
| J6(扭轉) | ±360° | ||
| *大速度 | 基本軸 | J1(旋轉1) | 3.66rad/s{210°/s} |
| J2(前后) | 3.66rad/s{210°/s} | ||
| J7(旋轉2) | 3.14rad/s{180°/s} | ||
| J3(上下) | 3.66rad/s{210°/s} | ||
| 手臂軸 | J4(回轉) | 7.33rad/s{420°/s} | |
| J5(擺動) | 7.33rad/s{420°/s} | ||
| J6(扭轉) | 10.82rad/s{620°/s} | ||
| 手臂負荷能力 | 允許扭矩 | J4(回轉) | 11.8N.m |
| J5(擺動) | 9.8N.m | ||
| J6(扭轉) | 5.9N.m | ||
| 允許慣性矩 | J4(回轉) | 0.30kg.m2 | |
| J5(擺動) | 0.25kg.m2 | ||
| J6(扭轉) | 0.06kg.m2 | ||
| 機器人動作范圍截面面積 | 2.58m2 ×340° | ||
| 使用環境條件 | 溫度:0~45℃、濕度:20~80%RH(無結露) | ||
| 本體重量 | 178kg | ||
| 上部手臂可載重量 | 10kg(注3) | ||
| 安裝方法 | 地面(注4) | ||
| 本體顏色 | 白色(芒賽爾色標10GY9/1) | ||
注1:位置重復精度遵照JIS B 8432 是標準的工具中心點(TCP)測量值?
注2:第6軸的動作范圍可能因第5軸的姿勢而受到限制
注3:上部手臂可搬重量隨著*大可搬重量可以變化
?
注4:需要側掛、吊裝規格時請咨詢我司銷售人員





?










免責聲明:當前頁為 機器人焊接系統FD-H5/FD-V6S廣州榮旭歐地希日本OTC品牌工業機器人產品信息展示頁,該頁所展示的 機器人焊接系統FD-H5/FD-V6S廣州榮旭歐地希日本OTC品牌工業機器人產品信息及價格等相關信息均有企業自行發布與提供, 機器人焊接系統FD-H5/FD-V6S廣州榮旭歐地希日本OTC品牌工業機器人產品真實性、準確性、合法性由店鋪所有企業完全負責。世界工廠網對此不承擔任何保證責任,亦不涉及用戶間因交易而產生的法律關系及法律糾紛,糾紛由會員自行協商解決。
友情提醒:世界工廠網僅作為用戶尋找交易對象,就貨物和服務的交易進行協商,以及獲取各類與貿易相關的服務信息的渠道。為避免產生購買風險,建議您在購買相關產品前務必確認供應商資質及產品質量。過低的價格、夸張的描述、私人銀行賬戶等都有可能是虛假信息,請您謹慎對待,謹防欺詐,對于任何付款行為請您慎重抉擇。
投訴方式:fawu@gongchang.com是處理侵權投訴的專用郵箱,在您的合法權益受到侵害時,請將您真實身份信息及受到侵權的初步證據發送到該郵箱,我們會在5個工作日內給您答復,感謝您對世界工廠網的關注與支持!
(c)2008-2025 世界工廠網V3.6 All Rights Reserved 豫ICP備2024066506號






